Ciencia, Ingenierías y Aplicaciones, Vol. 5, No. 1, enero-junio, 2022 ISSN (impreso): 2636-218X • ISSN (en línea): 2636-2171 • Sitio web: https://revistas.intec.edu.do/
Detección de baches y su severidad usando el Video VBOX Lite y teléfonos inteligentes
Detection of potholes and their severity using the Video VBOX Lite and smartphones
*Profesor adjunto. Departamento de Ingeniería Civil, Universidad Técnica Particular de Loja (UTPL). Loja, Ecuador. ORCID: https://orcid.org/0000-0002-0250-5155, Correo-e: ydgarcia1@utpl.edu.ec
**Ingeniero civil. Departamento de Ingeniería Civil, Universidad Técnica Particular de Loja (UTPL). ORCID: https://orcid.org/0000-0001-6616-2756, Correo-e: fdgarcia2@utpl.edu.ec
***Ingeniero civil. Departamento de Ingeniería Civil, Universidad Técnica Particular de Loja (UTPL). ORCID: https://orcid.org/0000-0002-1924-326X, Correo-e: vdquinche@utpl.edu.ec
****Ingeniero civil. Departamento de Ingeniería Civil, Universidad Técnica Particular de Loja (UTPL). ORCID: https://orcid.org/0000-0002-0086-9457, Correo-e: wamaygua@utpl.edu.ec
Recibido: ● Aprobado:

Cómo citar: García-Ramírez, Y., García, F., Quinche, V., & Maygua, W. (2022). Detección de baches y su severidad usando el Video VBOX Lite y teléfonos inteligentes. Ciencia, Ingenierías y Aplicaciones, 5(1), 77–107. https://doi.org/10.22206/cyap.2022.v5i1.pp77-107
1. Introducción
En todo el mundo las redes viales son usadas ampliamente para transportar bienes y servicios. En ellas, los Estados invierten una gran cantidad de recursos para mantenerlas operativas la mayor parte del tiempo. Sin embargo, en algunas ocasiones, la red vial es tan grande que los gobiernos no alcanzan a mantenerlas, por lo que se inicia su deterioro. Uno de estos deterioros son los baches que se producen en pavimento flexible, los cuales pueden afectar el confort en la conducción, seguridad vial y las condiciones del vehículo (Fan, Ozgunalp et al., 2021). Una de las tareas más críticas en las redes viales es el monitorear la carretera para detectar este tipo de anomalías (S. Gupta et al., 2020).
Generalmente, la detección de baches la realizan ingenieros viales o inspectores calificados. Esta tarea, extremadamente laboriosa, consume una gran cantidad de tiempo y, a veces, es poco efectiva, dado que, dependiendo de las condiciones climáticas y del tránsito, el bache que se registra hoy, en pocos días, puede aumentar su severidad. Es por ello que se han buscado alternativas tecnológicas que permita detectar baches con el menor costo posible. Es así que, en la actualidad, existen tres enfoques principales para su detección: basados en vibración, basados en reconstrucción en 3D y métodos basados en visión (Arjapure & Kalbande, 2020).
Dentro de estos enfoques se han empleado varias técnicas: inteligencia artificial (Tithi et al., 2021; Yebes et al., 2021) y su subcampo aprendizaje de máquinas (Egaji et al., 2021; Kandoi et al., 2021; Shah et al., 2021; Yik et al., 2021), redes neuronales (Kempaiah et al., 2022; Rahman et al., 2022) tales como convolucional (Agrawal et al., 2021; Fan, Wang, et al., 2021; Kharel & Ahmed, 2022; S. S. Park et al., 2021; Patra et al., 2021; Pratama et al., 2021; Rahman et al., 2022), aprendizaje profundo (Bhavya et al., 2021; Kempaiah et al., 2022; Li & Liu, 2021; Shah et al., 2021) y visión por computadora (Camilleri & Gatt, 2020; Fan, Wang, et al., 2021; Kharel & Ahmed, 2022; Riedl et al., 2020), utilizando principalmente el procesamiento de imágenes computarizadas (Muhammad Hanif et al., 2020; Tithi et al., 2021; Wang, 2021). También se han utilizado videos (Javed et al., 2021; Tithi et al., 2021), imágenes térmicas (S. Gupta et al., 2020), o imágenes aéreas (Han et al., 2020), imágenes de UAV (Becker1 et al., 2019), tecnología láser (Li & Liu, 2021; Ravi et al., 2020; Srivastava et al., 2020), tecnología LiDAR (J. S. Park et al., 2019; Ravi et al., 2020), análisis de agrupamiento (Fan, Ozgunalp, et al., 2021), entornos virtuales (Hu & Furukawa, 2020; Tsai et al., 2020), entre otros.
Para aplicar cualquier enfoque y el uso de la técnica es necesario recolectar información de la red vial. Esta recolección se ha hecho por medio de sensores a bordo vehículos o scooters (D. Gupta et al., 2021), sensores con GPS (Kempaiah et al., 2022; Pratama et al., 2021; Thakur et al., 2020), acelerómetros (Kempaiah et al., 2022; Kotha et al., 2020; Kumar et al., 2020; Yik et al., 2021), cámaras (Aswath et al., 2022; Muhammad Hanif et al., 2020; Pratama et al., 2021; Riedl et al., 2020; Tsai et al., 2020; Yik et al., 2021), estéreo cámara (Bangalore Ramaiah & Kundu, 2021), sensor ultrasónico (Arulananth et al., 2022; Ganesh Babu et al., 2020; Thakur et al., 2020), tabletas (Egaji et al., 2021), sensores móviles junto con sensores basados en imágenes (Kandoi et al., 2021), sensores de los teléfonos inteligentes (Ashwini et al., 2020; Kyriakou et al., 2019; Lekshmipathy et al., 2021; Mamatha et al., 2020; Ravi et al., 2020; Silvister et al., 2019; Thiruppathiraj et al., 2020; Van Khang & Renault, 2019), por citar algunos.
Como se puede ver, existe una gran cantidad de investigaciones sobre la detección de los baches. La selección del enfoque o la técnica condicionará los resultados e influirá en el costo de implementación. La utilización de los sensores de teléfonos inteligentes para detectar baches es muy llamativa, dado que este tipo de teléfonos se ha extendido ampliamente en el mundo y los usuarios pueden compartir esa información como un crowdsourcing. Sin embargo, es necesario entender la relación entre la información que recolecta el equipo con el bache (ubicación y severidad). En esta relación, los métodos que ofrecen mejores precisiones son los enfoques que usan las técnicas basadas en inteligencia artificial, pero estos pueden llegar a tener una gran demanda computacional. Es más, la precisión de detección de baches aún está lejos de ser satisfactoria (Fan et al., 2020), por lo que aún es necesario seguir explorando otros procedimientos.
En este contexto, el objetivo de este estudio es proponer un procedimiento para detectar baches y su severidad usando el Video VBOX Lite y dos teléfonos inteligentes: Samsung Galaxy S9 y Huawei P20. El estudio se realizó en una ciudad de Loja – Ecuador, de tal forma que puede servir para otras ciudades que tienen similares condiciones ambientales, constelación de satélites, cobertura de redes de teléfono celular, tipos de teléfonos disponibles en el mercado, entre otros. Para explicar los resultados de este estudio, el resto del artículo se organiza de la siguiente manera. En la sección 2 se muestran los materiales y métodos utilizados. En este apartado se detallan los tramos en donde se recolectaron los datos, las dos fases de recolección de datos y el procesamiento de datos. Luego, en la sección 3 se muestran los procedimientos que se proponen para detectar baches y su severidad para el Video VBOX Lite y los dos teléfonos celulares. En cada procedimiento se mencionan los filtros, umbrales y ecuaciones que se utilizan para llegar a detectar un bache (ubicación y severidad). Posteriormente, en la sección 4, se muestran los resultados de aplicación de los procedimientos, para luego después realizar la calibración con vías con condiciones similares. Finalmente, se discuten los resultados y se presentan las principales conclusiones.
2. Materiales y métodos
El objetivo del presente estudio es proponer un procedimiento para detectar baches y la severidad que pueden tener estos. Para ello, se eligieron los tramos viales del estudio, luego, se recolectaron datos manuales y después con los equipos seleccionados. Los primeros se procesaron para ubicar y clasificar su severidad, mientras que los datos de los equipos registraron las variaciones en los sensores que tienen instalados, y sirven para analizar su relación con los datos de recolección manual. Basado en estas dos fuentes de datos se propondrá un procedimiento para el Video VBOX Lite y otro para los teléfonos inteligentes.
2.1 Tramos viales del estudio
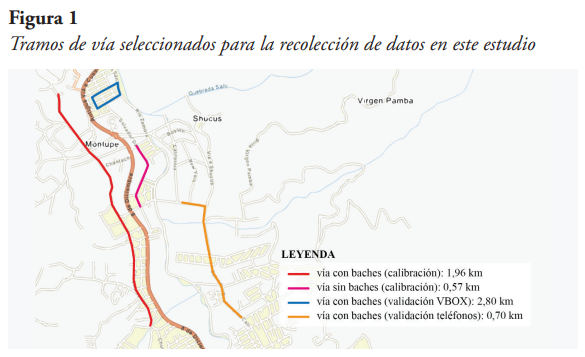
Para la recolección de datos se eligieron dos tipos de tramos viales: para la calibración del procedimiento y para la validación del modelo (véase figura 1). Para la calibración se recolectaron dos tramos: uno en donde no existían baches y en otro donde existían baches. El tramo sin baches sirvió para entender la variación de los sensores de los equipos cuando la vía no tiene esas anomalías, mientras que el tramo con baches sirvió para proponer el procedimiento. El resto de tramos viales sirvieron para validar el procedimiento que se plantea. Estos tramos viales corresponden a la ciudad de Loja (Ecuador).
2.2 Recolección de datos
2.2.1 Datos manuales
La recolección manual de los baches consistió en medir la posición, profundidad y diámetro de cada bache en todos los tramos de estudio. La posición fue recolectada con un navegador, mientras que la profundidad y diámetros fueron realizados con un flexómetro. También se tomaron fotos de cada bache recolectado.
2.2.2 Datos con los equipos
Antes de iniciar con la recolección de datos, se eligió al Kia Sportage 2006 como un vehículo de prueba. Este vehículo tuvo una revisión mecánica del sistema de suspensión para eliminar que los sensores detecten erróneamente un bache. Luego, se eligieron los equipos de recolección de datos: el Video VBOX Lite y los teléfonos celulares.
El Video VBOX Lite, previamente utilizado en estudios de velocidad, recolecta información de distancia, número de satélites, velocidad, azimut, latitud, longitud, altura, velocidad vertical, aceleración lateral, aceleración longitudinal, entre otros. El Video VBOX Lite tiene una antena GPS que se coloca en la parte superior del vehículo, lo cual asegura una precisión del 0,05 % por distancia recorrida, 0,2 km/h para la velocidad y ± 10 m para la altura. Este equipo tiene una frecuencia de muestreo de 10 Hz. Por otro lado, se eligieron los teléfonos: Samsung Galaxy S9 y el Huawei P20. Ambos poseen sensores GPS y acelerómetros y funcionan con sistema operativo Android. La precisión del GPS es de ± 6 m, mientras que la de la aceleración es 0,0024 m/s2 para el equipo Samsung y 0,0096 m/s2 para el equipo Huawei. En estos celulares se instaló la aplicación Physics Toolbox Suite® que permite recolectar la posición, tiempo, velocidad y aceleraciones con posibilidad de seleccionar la frecuencia de muestreo. En este estudio se seleccionó 10 Hz para los acelerómetros y 1 Hz para la posición.
Los equipos seleccionados fueron instalados dentro del vehículo de prueba. La antena GPS del Video VBOX Lite fue colocada en la parte superior del vehículo. Esta antena se conecta a un equipo donde recolecta la información. Este equipo y los teléfonos celulares se colocaron en el tablero del mando cerca del parabrisa frontal. Se tuvo cuidado de que la instalación no afectara la visión para una conducción segura. Los teléfonos y la consola del Video VBOX Lite fueron pegados al tablero con cinta adhesiva para que no se muevan durante la recolección de datos. En este tablero, ambos equipos se colocaron de manera horizontal. La recolección se realizó en el sentido de ida y de regreso. Las velocidades promedio del recorrido en los tramos de calibración fueron 20, 30, 40 y 50 km/h, mientras que en los de calibración fueron variables entre 20-50 km/h.
2.3 Procesamiento de datos
2.3.1 Datos manuales
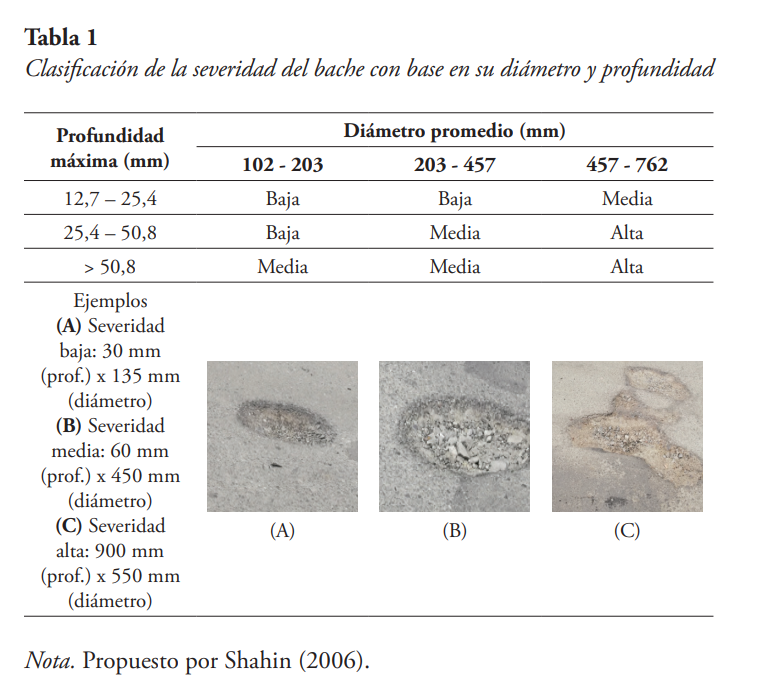
Luego de haber recolectado los datos, estos fueron verificados para evitar errores, ya sea de tipeo, o en la recolección automática de la localización. Para ello, en la foto de cada bache se midió el diámetro del bache y se comparó con el registro manual. También, las coordenadas de los baches fueron dibujadas en imágenes satelitales. Se corrigieron los errores o se volvió a registrar la posición de bache para tener una base de datos lista para realizar los siguientes análisis. Con los datos de diámetro y profundidad, y utilizando la tabla 1 (Shahin, 2006), se clasificaron los baches. En esta tabla también se han colocado unos ejemplos gráficos para ilustrar lo que se ha recolectado en este estudio.
2.3.2 Datos con los equipos
Los datos recolectados por el Video VBOX Lite fueron extraídos por el VBOX Test Suite®, mientras que los datos de los teléfonos celulares fueron extraídos mediante un *cvs que se genera en la aplicación. Los datos principales de ambos equipos fueron: coordenadas, la velocidad, las aceleraciones y el tiempo. En ambos casos, los datos se colocaron en una hoja electrónica para facilitar los cálculos. Los baches recolectados de manera manual fueron emparejados con los datos recolectados con los sensores de los equipos. Con esta base de datos, se inició el proceso de calibración del procedimiento.
3. Procedimientos propuestos para detectar baches y su severidad
3.1 Precisión del procedimiento
Antes de iniciar con la descripción de los procedimientos, es necesario mencionar cómo se evaluará la eficacia de los mismos. Para ello se utilizarán tres conceptos: precisión, falsos positivos y falsos negativos. La precisión del procedimiento es la relación (en porcentaje) entre baches recolectados y los baches detectados por el procedimiento. Mientras más alto sea este valor, significará que el procedimiento detecta un mayor número de baches y viceversa. Por otro lado, los falsos positivos son aquellos baches que el procedimiento detecta, pero que en realidad no existen en el recorrido; en tanto que los falsos negativos son aquellos que el procedimiento no los detecta, pero que sí están presentes en el recorrido. En ambos casos, estos valores se relacionarán con los baches reales para determinar un porcentaje. Mientras más bajos sean estos valores, el procedimiento será más eficaz que otros que produce valores más altos.
3.2 Equipo Video VBOX Lite
El procedimiento para detección de baches y su severidad incluye una serie de filtros y umbrales para reducir y/o eliminar el ruido de los datos recolectados por los sensores del equipo. Las variables afectadas cuando se circuló por un bache fueron la aceleración vertical (z), aceleración lateral (x) y la velocidad del vehículo.
3.2.1 Aplicación del umbral de aceleración vertical (z) y aceleración lateral (x)
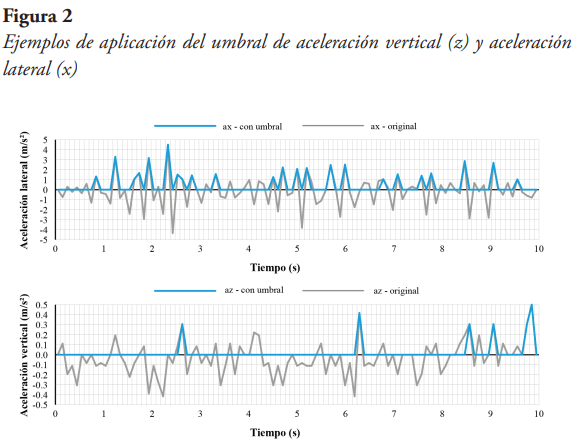
Para determinar el umbral aplicable a la aceleración vertical y lateral se siguió un procedimiento propuesto previamente (Harikrishnan & Gopi, 2017). La idea de este umbral es eliminar todos los valores que sean propios de la variabilidad de la recolección de los sensores del equipo en una calle con baches y otra sin ellos. Entonces, en la vía sin baches, se calculó el promedio de la aceleración lateral y el valor máximo de la aceleración vertical. Se encontró un valor de 1,00 m/s2 para la aceleración lateral y 0,31 m/s2 para la aceleración vertical. Con estos datos se eliminaron todos los valores que tuvieron una aceleración lateral menor a 1,00 m/s2 y una aceleración vertical menor a 0,31 m/s2. Un ejemplo de la aplicación de estos umbrales se muestra en la figura 2.
3.2.2 Hacer más visibles las anomalías detectadas por medio de Azx
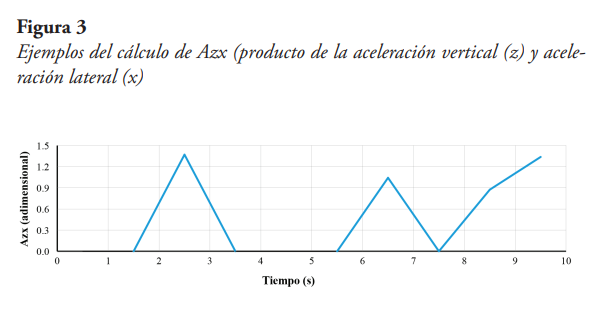
Este paso tiene por objetivo que la base de datos resultante del paso anterior exagere sus valores, de tal forma de que sea más evidente la presencia de un bache. Para ello, se usó el producto Máx-Abs de Harikrishnan y Gopi (2017), que multiplica la aceleración lateral por la vertical. En este sentido, en primer lugar, se debe calcular el valor máximo de la aceleración lateral y vertical del proceso anterior, ocupando un ancho de ventana de 10 datos, lo que significa que se obtendrá este producto cada 1 segundo y no cada 0,1 s que es la separación de la base de datos original. Con esto se obtiene una nueva base de datos mucho más pequeña que la anterior. Este producto se denominó Azx y es adimensional. Un ejemplo de cálculo, a partir de los datos de la figura 2, se puede ver en la figura 3.
3.2.3 Aplicación del umbral a Azx basado en la velocidad
A pesar de contar con una base de datos reducida con la aplicación de los pasos anteriores, los datos aún presentan ruido debido a las velocidades de circulación del vehículo. Es entendible, que mientras más lento vaya el vehículo más tiempo tenga para que los sensores del equipo obtengan la información, en comparación a cuando un vehículo va a velocidades altas. Este paso se realizó con base en un estudio previo (Eriksson et al., 2008). Los umbrales basados en velocidad se obtienen por tanteos con base en la información reducida de las vías con baches. Para ello, se agruparon los recorridos en rangos de velocidades de 20 en 20 km/h. De esta agrupación, se eligieron los siguientes umbrales de Azx: 0,60 para velocidades menores a 20 km/h, 0,75 para velocidades entre 20 y 40 km/h, y 0,90 para velocidades entre 40 y 60 km/h. Se probaron otros valores y diferente agrupación de velocidades, sin embargo, sus resultados fueron menos precisos que los presentados. Estos umbrales se aplican de la siguiente manera; si en un recorrido se circula a una velocidad menor a 20 km/h, los valores mayores a 0,6 en Azx serán considerado como baches y los valores menores serán descartados. Se busca las coordenadas de los valores de Azx que quedan, con lo que se obtiene su ubicación. Hay que considerar que como se utilizó un ancho de ventana de 1 segundo, este bache puede estar desplazado una cierta distancia que depende de la velocidad de circulación del vehículo.
3.2.4 Estimación de la severidad del bache
Como ya se vio previamente, los baches fueron clasificados de acuerdo a lo propuesto por Shahin (2006). Entonces, para estimar la severidad de los baches, con el Video VBOX Lite, se realizó un promedio de todos los baches (de la vía con baches) clasificados según la severidad y velocidad de circulación, cuyo resultado se muestra en la tabla 2. El valor resultante de Azx se compara con el promedio ± el intervalo de confianza (IC95%) de la tabla 2. Si este está dentro de este rango, entonces se caracteriza y se le asigna una severidad. En la tabla 2, además del promedio, también se colocaron otros estadísticos del Azx para entender la variabilidad de los datos. No fue posible determinar valores para severidad baja debido a que no hubo en este recorrido. De todas formas, los baches de severidad baja son menos peligrosos para los conductores.
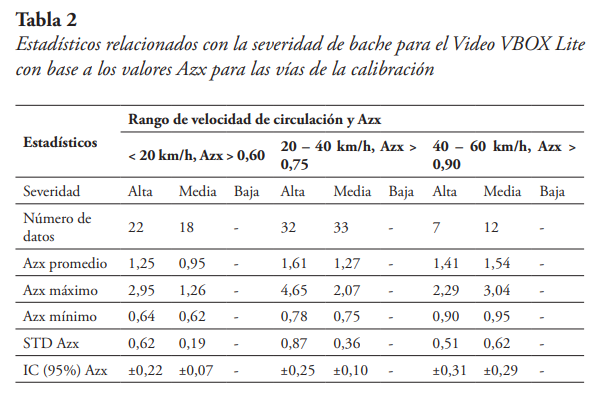
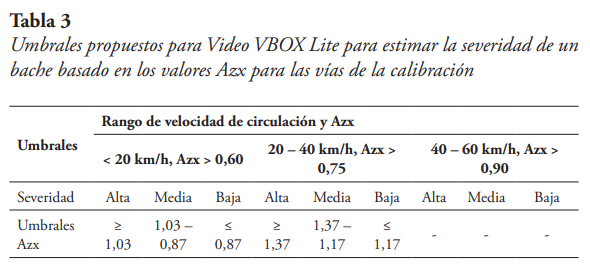
En la tabla 2 se puede ver que en los rangos de velocidades hasta 40 km/h, las severidades altas les corresponden valores más altos y decrecen conforme disminuye la severidad. Esto no ocurre en el rango de 40-60 km/h, lo cual se debe al bajo número de datos en esos umbrales. Esto podría validarse o ajustarse en futuras investigaciones con velocidades de circulación mayores a 40 km/h. Para estimar la severidad del bache para otras vías no se puede usar directamente los estadísticos de la tabla 2, por lo que se propuso la tabla 3, basada en el Azx promedio y el intervalo de confianza, con ligeros ajustes. Con estos umbrales, incluso se pueden clasificar los baches de severidad baja hasta una velocidad de 40 km/h, ya que luego de ese valor los resultados fueron inconsistentes.
3.3 Teléfonos inteligentes
No fue posible seguir el mismo procedimiento del Video VBOX Lite, dado que los datos que se reciben en los teléfonos inteligentes son más limitados y su precisión difiere. Los teléfonos al tener integrado el GPS dentro del equipo tendrá una precisión menor que el Video VBOX Lite, dado que este tiene la antena GPS colocada por sobre el vehículo. Con esta ubicación se eliminan interferencias que dentro del vehículo se pueden encontrar. A pesar de esta limitación, se logró presentar un procedimiento que incluye: una reorientación virtual, filtro para velocidad cero, filtro relacionado con el ruido de baja frecuencia, un suavizado y umbrales para la aceleración vertical.
3.3.1 Reorientación virtual del teléfono inteligente
Para que la recolección de datos de un teléfono inteligente sea información que se relacione con el vehículo en donde está instalado, sus ejes deben estar alineados con los ejes del vehículo. Esto se produce cuando el teléfono ubicado de manera perfectamente horizontal y su eje longitudinal coincide con el del vehículo. En la práctica, es difícil de lograrlo, dado que en el tablero del vehículo no existen superficies planas y, muchas veces, los teléfonos se colocan de manera vertical. Entonces, para corregir la colocación del vehículo, los datos recolectados deben reorientarse virtualmente, utilizando el método de ángulos de Euler (Singh et al., 2017).
Para esta reorientación, en primer lugar, se calculan los ángulos de orientación α y ß, en función del registro del acelerómetro: aceleración lateral (ax), aceleración longitudinal (ay) y aceleración vertical (az), con las siguientes ecuaciones:
(1)
(2)
Posteriormente, se calculan las aceleraciones reorientadas (a’x , a’y , a’z ) en cada uno de los ejes, mediante las siguientes expresiones matemáticas:
(3)
(4)
(5)
Entonces, toda la base de datos se corrige con el uso de las ecuaciones 1-5. De los resultados experimentales, las aceleraciones verticales son las que más se afectan con las depresiones en las calles, por lo tanto, el resto del procedimiento se concentra en esta aceleración.
3.3.2 Filtro con velocidad cero
Cuando el vehículo está estacionado, el teléfono inteligente sigue registrando información, debido, principalmente, a las vibraciones del motor, mas no a la presencia de un bache, por lo tanto, el siguiente paso fue eliminar todos los registros en donde el vehículo tuvo velocidad cero. Esta eliminación permite una demanda computacional más baja y, además, permite visualizar más fácilmente las tendencias de la aceleración y muy útil si se desea detectar baches utilizando aplicaciones de teléfono celular.
3.3.3 Filtro relacionado con el ruido de baja frecuencia
Asimismo, se debe considerar que la información de baja frecuencia, relacionada con bajas velocidades, también genera ruido en los datos recolectados. En un estudio anterior (Vittorio et al., 2014) se considera una velocidad de 5 km/h como valor de referencia y se usan las siguientes condiciones:
(6)
Donde: az-5 km/h es la aceleración vertical luego de aplicar el filtro de los 5 km/h, a’z es la aceleración vertical reorientada, y a’z-máx-5 km/h es el valor máximo de la aceleración vertical reorientada cuando el vehículo transita a una velocidad de 5 km/h.
El valor de a’z-máx-5 km/h no es un valor fijo y dependerá de los datos recolectados. Luego de aplicar las expresiones previas se elimina la información de baja frecuencia.
3.3.4 Suavizado en la aceleración vertical
En los teléfonos inteligentes, la aceleración vertical es la variable que más varía cuando se circula sobre un bache; sin embargo, presenta, por diversos motivos, aún ruido en sus datos. Por lo tanto, se aplica un nuevo paso que suaviza los datos. Esta suavización, normalizado al eje vertical (z) (Pawar et al., 2020), se realiza con la siguiente ecuación:
(7)
Donde: azi-sua = aceleración vertical suavizada, az-5km/h-i = aceleración vertical luego de aplicar el filtro de los 5 km/h, az-5km/h-prom= valor promedio de la aceleración vertical luego de aplicar el filtro de los 5 km/h, az- az-5km/h-STD = desviación estándar aceleración vertical luego de aplicar el filtro de los 5 km/h.
3.3.5 Umbral final de la aceleración vertical
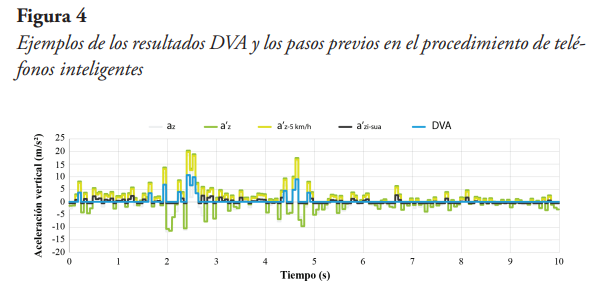
Finalmente, se aplica un umbral a la aceleración vertical suavizada denominado DVA. Se adoptó un valor de 3 m/s2 (Vittorio et al., 2014) como umbral. Solo cuando el valor a’zi-sua exceda ese valor, entonces, se considerará como bache. Un ejemplo del cálculo de DVA, así como todos los pasos anteriores del procedimiento, se puede ver en la figura 4. A cada fila de la base de datos final le corresponde unas coordenadas, por lo tanto, con esto ya se podrá localizar el bache.
3.3.6 Estimación de la severidad del bache
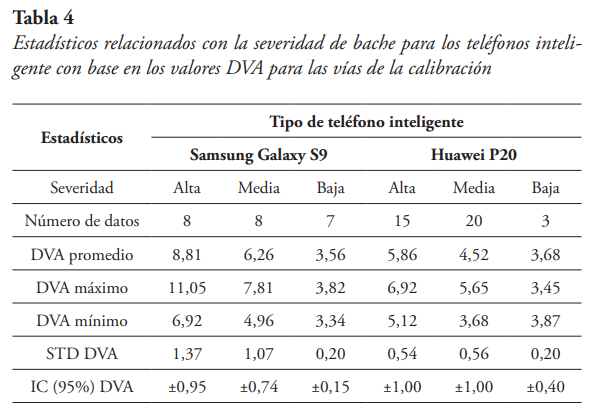
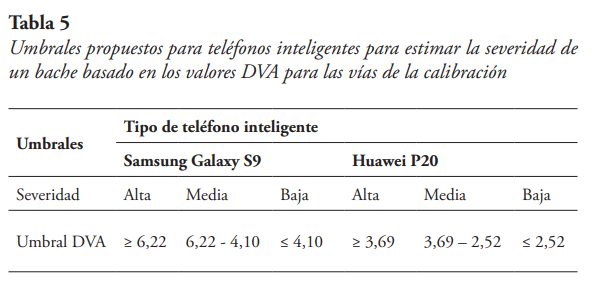
A fin de estimar la severidad del bache, se propone la tabla 4 para los dos teléfonos inteligentes. En esta tabla se han colocado varios estadísticos saltos corresponden a severidades altas, y cuando se reduce el valor de DVA la severidad disminuye. Esto se aplica a ambos teléfonos, sin embargo, los valores no son los mismos. Generalmente, la desviación estándar del teléfono Samsung es más alta que el Huawei. Esto se debe al tipo de sensores que tienen los teléfonos, dado que están utilizando la misma aplicación de recolección, mismo día, mismo sitio y misma posición del teléfono.
Los datos de la tabla 4 no se pueden usar directamente para determinar la severidad de baches en otras vías, por lo tanto, se proponen umbrales de DVA, basados en su promedio y en su intervalo de confianza, cuyo error fue distribuido entre tipo de severidad. Su resultado se muestra en la tabla 5.
4. Resultados
4.1 Equipo Video VBOX Lite
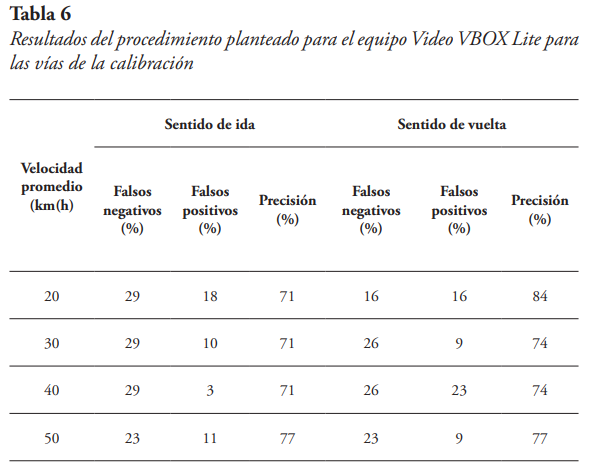
El procedimiento VBOX, descrito previamente, fue aplicado a la vía de la calibración y cuyo resultado se muestra en la tabla 6. En esta tabla se ha colocado el sentido de circulación (ida y vuelta) y la velocidad promedio del recorrido. Como se puede ver, la precisión de este procedimiento está entre 71-84 %, mientras que los falsos negativos entre 9-29 % y los falsos positivos entre 3-23 %.
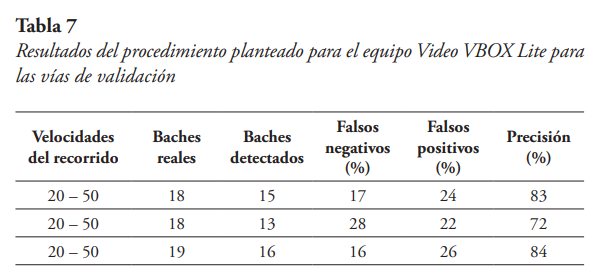
El procedimiento fue validado en los otros recorridos realizados, cuyo resultado se muestra en la tabla 7. En este caso, la precisión del procedimiento estuvo entre el 72-84 %, resultado muy parecido al anterior. Los falsos negativos estuvieron entre 16 a 17 %, mientras que los falsos positivos estuvieron entre 22-26 %. Estos resultados también son similares a los previos, por lo que se pueden considerar como un procedimiento válido.
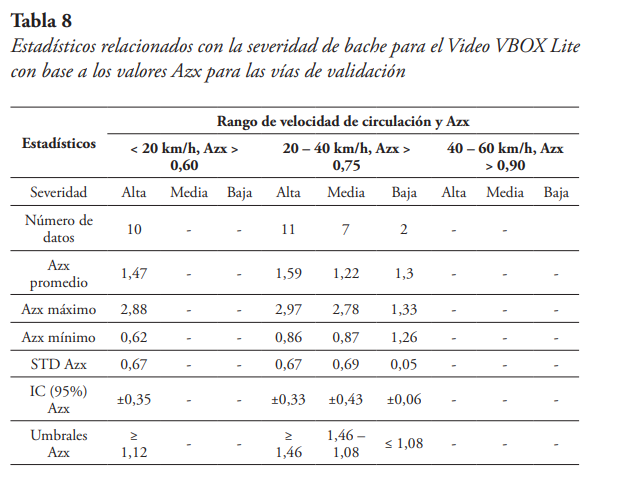
Por otro lado, los umbrales para clasificar al bache también fueron calculados en las vías de validación. Estos resultados se pueden ver al final de la tabla 8. No fue posible calcular en todos los rangos de velocidad o severidad, debido a que estas vías no poseen todos los rangos que se tuvieron en la calibración. Como se puede ver en la tabla 8, los resultados son bastante parecidos a los calibrados en la 3, por lo tanto, también se pueden considerar como válidos.
4.2 Teléfonos inteligentes
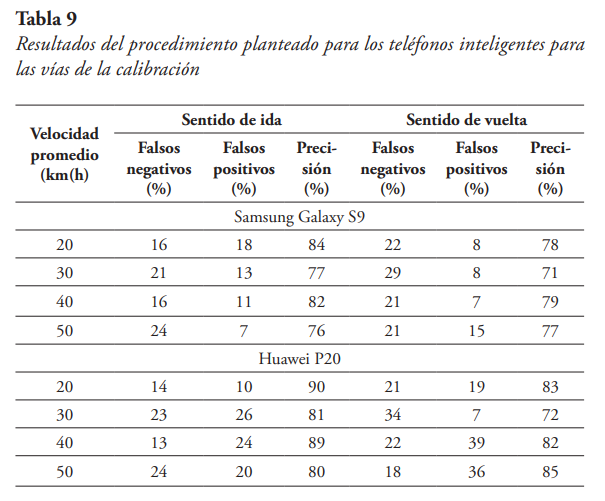
Asimismo, el procedimiento para detectar los teléfonos inteligentes también aplicado a la vía de calibración y validación. El primer resultado se puede ver en la tabla 9. La precisión del teléfono Samsung Galaxy S9 está entre 71-84 %, los falsos negativos entre 7 y 24 % y los falsos positivos entre 7 y 18 %. Estos valores están muy cercanos a los obtenidos con el Video VBOX Lite. Por otro lado, para el teléfono Huawei P20, la precisión está entre el 72-90 %, los falsos negativos están entre 13-34 %, y los falsos positivos entre 7-39 %. A pesar de que con el Huawei se obtienen mejores precisiones, por otro lado, se aumentan los resultados falsos, lo cual es negativo para la eficacia del procedimiento.
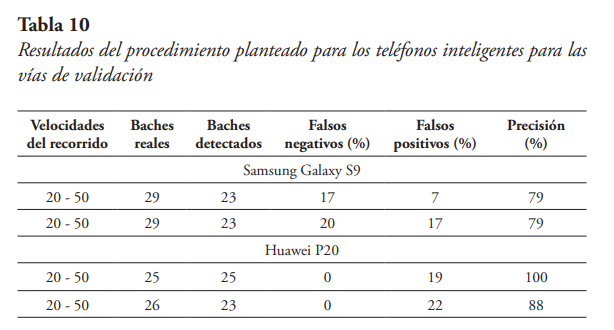
El procedimiento fue validado con otro recorrido, y cuyo resultado se ve en la tabla 10. La precisión de ambos teléfonos estuvo entre 79-100 %, los falsos negativos entre 0-20 % y los falsos positivos entre 7-22 %. Con estos resultados también se puede decir que el procedimiento es válido.
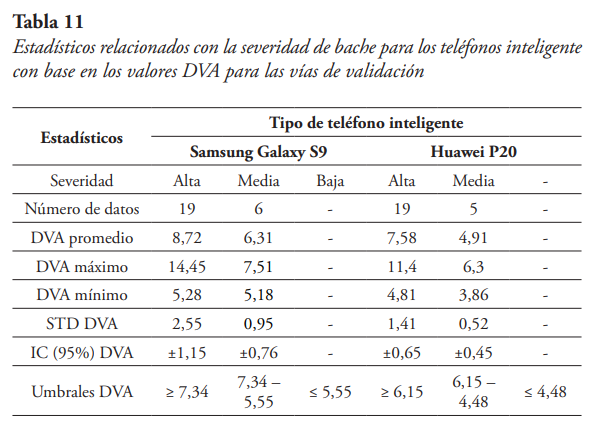
En lo que se refiere a los umbrales para clasificar el bache, también fueron calculados en las vías de validación (véase final de la tabla 11). En este caso, debido a la cantidad de datos que se tienen en la severidad media, los umbrales varían, especialmente, para el teléfono Huawei P20. En el caso del teléfono Samsung, las diferencias son menores, por lo tanto, se podrían considerar como aceptables para este equipo. En el caso de Huawei P20 se debería profundizar esta variación es estudios posteriores.
5. Discusión
El presente estudio presentó dos metodologías para detectar baches y su severidad para equipos basados en vibración. La precisión alcanzada en estos procedimientos fue entre 71-90 %. Estudios previos alcanzaron una precisión en la detección del 75 % (Yebes et al., 2021), 80 % (Kempaiah et al., 2022), 84 % (Bangalore Ramaiah & Kundu, 2021), 88 % (Pundir et al., 2021), 90 % (Kyriakou et al., 2019), por citar algunos. Los resultados de este estudio, comparado con los resultados son bastante aceptables. Sin embargo, si se los compara con estudios basados con otro enfoque o combinación de técnicas de procesamiento de información, como inteligencia artificial, esta precisión aumenta considerablemente: 93,18 % (Lekshmipathy et al., 2021), 95,2 % (Chen et al., 2020), 97,6 % (Patra et al., 2021), 98,1 % (Aswath et al., 2022), 98,7 % (Fan et al., 2020), 99,6 % (Fan et al., 2020), incluso, algunos pocos han llegado al 100 % de detección. Desafortunadamente, para lograr estos valores de precisión es necesario mayores recursos, ya sea en adquirir equipos, personal calificado, mayor demanda computacional, etc., que algunos gobiernos no están dispuestos a invertir. El procedimiento que se plantea es una muy buena primera experiencia, dado que en Latinoamérica no se conoce de estudios similares.
6. Conclusiones
Este estudio tuvo por objetivo proponer un procedimiento para detectar baches y su severidad usando el Video VBOX Lite y dos teléfonos inteligentes: Samsung Galaxy S9 y Huawei P20. Los equipos se colocaron dentro de un vehículo de prueba, y cuyos sensores recolectaron, mediante vibración o GPS, la aceleración en los tres ejes, la velocidad del vehículo, entre otros. A partir del análisis de estos resultados se presentan las principales conclusiones.
Los procedimientos para el Video VBOX Lite y Samsung S9, a pesar de ser diferentes, dan resultados consistentes en los recorridos de calibración y los de validación. Esto los hace más confiables a la hora de usarlos en recolección de datos masiva. Es evidente que el equipo VBOX, aunque sea más preciso, no será adquirido por los usuarios. Sin embargo, los resultados del Samsung S9 son similares a los del Video VBOX Lite, por lo que este teléfono se puede utilizar con más confianza en la detección de baches y clasificación de su severidad. Esto no sucede con el equipo Huawei que obtuvo resultados más diversos entre recorridos y sus valores fueron diferentes a los del otro equipo celular y al VBOX Lite.
Los resultados son confiables hasta una velocidad de 40 km/h, ya que luego existieron pocos datos, por lo que se debería profundizar en futuros estudios. A diferencia de investigaciones previas, este procedimiento incluye rangos de velocidades para detectar los baches. Además de la detección de los baches, también se presentan umbrales para calificar la severidad de los mismos. Ambos resultados son la base para utilizarlas en aplicaciones que se puede distribuir en la población con el fin de recolectar datos de las redes viales.
Este estudio tiene una serie de limitaciones. Solo se han probado dos teléfonos inteligentes. Además, solo se han analizado tramos cortos de vías (hasta 2,80 m). También no se conoce si el procedimiento es aplicable en condiciones climáticas adversas o durante la noche. Así mismo, la velocidad máxima detectada estuvo cerca de 60 km/h, aunque su aplicabilidad llega hasta los 40 km/h. A pesar de estas limitaciones, el estudio presentó dos procedimientos para detectar baches y su severidad. Lo expuesto es de baja demanda computacional, lo que facilitaría que se coloquen en aplicaciones de teléfonos inteligentes. De igual modo, el estudio muestra las variables que influyen en la detección y severidad y propone umbrales o valores que se pueden usar en otros estudios. Y, principalmente, que se puedan utilizar para elaborar aplicaciones que recolecten y clasifiquen los baches, cuyo impacto social será considerable. Finalmente, las limitaciones de esta investigación se pueden abordar con mayor profundidad en el futuro.
Reconocimientos
Los autores agradecen a la SENESCYT (Secretaría de Educación Superior, Ciencia, Tecnología e Innovación) y a la Universidad Técnica Particular de Loja por el apoyo brindado en esta investigación.
Referencias
Agrawal, R., Chhadva, Y., Addagarla, S., & Chaudhari, S. (2021, May 21). Road surface classification and subsequent pothole detection using deep learning. 2021 2nd International Conference for Emerging Technology, INCET 2021. https://doi.org/10.1109/INCET51464.2021.9456126
Anand, A., Gawande, R., Jadhav, P., Shahapurkar, R., Devi, A., & Kumar, N. (2020). Intelligent Vehicle Speed Controlling and Pothole Detection System. E3S Web of Conferences, 170. https://doi.org/10.1051/E3SCONF/202017002010
Arjapure, S., & Kalbande, D. R. (2020). Review on Analysis Techniques for Road Pothole Detection. Advances in Intelligent Systems and Computing, 1053, 1189–1197. https://doi.org/10.1007/978-981-15-0751-9_109
Arulananth, T. S., Baskar, M., Thrishma, K., Srilekha, N., Supraja, S., & Ravalika, C. (2022). Pothole Detection Using Arduino and Ultrasonic Sensors. Lecture Notes in Networks and Systems, 292, 435–442. https://doi.org/10.1007/978-981-16-4435-1_42
Ashwini, K. S., Bhagwat, G., Sharma, T., & Pagala, P. S. (2020, July 1). Trigger-Based Pothole Detection Using Smartphone and OBD-II. Proceedings of CONECCT 2020 - 6th IEEE International Conference on Electronics, Computing and Communication Technologies. https://doi.org/10.1109/CONECCT50063.2020.9198602
Aswath, M., Raj, S. J., & Mohanaprasad, K. (2022). Real-Time Pothole Detection with Onboard Sensors and Camera on Vehicles. Lecture Notes in Electrical Engineering, 792, 479–488. https://doi.org/10.1007/978-981-16-4625-6_47
Bangalore Ramaiah, N. K., & Kundu, S. (2021). Stereo Vision Based Pothole Detection System for Improved Ride Quality. SAE Technical Papers, 2021. https://doi.org/10.4271/2021-01-0085
Becker, Y. V. F., Siqueira, H. L., Matsubara, E. T., Gonçalves, W. N., & Marcato, J. (2019). Asphalt pothole detection in uav images using convolutional neural networks. International Geoscience and Remote Sensing Symposium (IGARSS), 2019-July, 56–58. https://doi.org/10.1109/IGARSS.2019.8900621
Bhavya, P., Sharmila, C., Sai Sadhvi, Y., Prasanna, C. M. L., & Ganesan, V. (2021). Pothole Detection Using Deep Learning. Lecture Notes in Networks and Systems, 210 LNNS, 233–243. https://doi.org/10.1007/978-981-16-1773-7_19
Bridgelall, R., & Tolliver, D. (2020). Accuracy enhancement of anomaly localization with participatory sensing vehicles. Sensors (Switzerland), 20(2). https://doi.org/10.3390/S20020409
Camilleri, N., & Gatt, T. (2020). Detecting road potholes using computer vision techniques. Proceedings - 2020 IEEE 16th International Conference on Intelligent Computer Communication and Processing, ICCP 2020, 343–350. https://doi.org/10.1109/ICCP51029.2020.9266138
Chen, H., Yao, M., & Gu, Q. (2020). Pothole detection using location-aware convolutional neural networks. International Journal of Machine Learning and Cybernetics, 11(4), 899–911. https://doi.org/10.1007/S13042-020-01078-7
Du, Z., Yuan, J., Xiao, F., & Hettiarachchi, C. (2021). Application of image technology on pavement distress detection: A review. Measurement: Journal of the International Measurement Confederation, 184. https://doi.org/10.1016/J.MEASUREMENT.2021.109900
Egaji, O. A., Evans, G., Griffiths, M. G., & Islas, G. (2021). Real-time machine learning-based approach for pothole detection. Expert Systems with Applications, 184. https://doi.org/10.1016/J.ESWA.2021.115562
Eriksson, J., Girod, L., Hull, B., Newton, R., Madden, S., & Balakrishnan, H. (2008). The pothole patrol: using a mobile sensor network for road surface monitoring. 6th International Conference on Mobile Systems, Applications, and Services, 29–39. https://doi.org/10.1145/1378600.1378605
Fan, R., Ozgunalp, U., Hosking, B., Liu, M., & Pitas, I. (2020). Pothole Detection Based on Disparity Transformation and Road Surface Modeling. IEEE Transactions on Image Processing, 29, 897–908. https://doi.org/10.1109/TIP.2019.2933750
Fan, R., Ozgunalp, U., Wang, Y., Liu, M., & Pitas, I. (2021). Rethinking Road Surface 3-D Reconstruction and Pothole Detection: From Perspective Transformation to Disparity Map Segmentation. IEEE Transactions on Cybernetics. https://doi.org/10.1109/TCYB.2021.3060461
Fan, R., Wang, H., Wang, Y., Liu, M., & Pitas, I. (2021). Graph Attention Layer Evolves Semantic Segmentation for Road Pothole Detection: A Benchmark and Algorithms. IEEE Transactions on Image Processing, 30, 8144–8154. https://doi.org/10.1109/TIP.2021.3112316
Ganesh Babu, R., Chellaswamy, C., Surya Bhupal Rao, M., Saravanan, M., Kanchana, E., & Shalini, J. (2020, July 1). Deep learning based pothole detection and reporting system. 2020 7th International Conference on Smart Structures and Systems, ICSSS 2020. https://doi.org/10.1109/ICSSS49621.2020.9202061
Gupta, D., Xu, W., Yu, X., & Huang, M. C. (2021). Campus safety and the internet of wearable things: Assessing student safety conditions on campus while riding a smart scooter. 2021 IEEE 17th International Conference on Wearable and Implantable Body Sensor Networks, BSN 2021. https://doi.org/10.1109/BSN51625.2021.9507033
Gupta, S., Sharma, P., Sharma, D., Gupta, V., & Sambyal, N. (2020). Detection and localization of potholes in thermal images using deep neural networks. Multimedia Tools and Applications. https://doi.org/10.1007/S11042-020-09293-8
Han, Y., Kim, S. J., Lee, D. W., Park, J. H., Lee, S. W., & Seo, D. (2020). Development of a pothole detection result management system in road aerial images. JP Journal of Heat and Mass Transfer, 2020(Special Issue 1), 77–81. https://doi.org/10.17654/HMSI120077
Harikrishnan, P. M., & Gopi, V. P. (2017). Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sensors Journal, 17(16), 5192–5197. https://doi.org/10.1109/JSEN.2017.2719865
Hiremath, R., Malshikare, K., Mahajan, M., & Kulkarni, R. V. (2021). A Smart App for Pothole Detection Using Yolo Model. Lecture Notes in Networks and Systems, 154, 155–164. https://doi.org/10.1007/978-981-15-8354-4_16
Hu, Y., & Furukawa, T. (2020). Degenerate near-planar 3D reconstruction from two overlapped images for road defects detection. Sensors (Switzerland), 20(6). https://doi.org/10.3390/S20061640
Javed, A., Mahmud, M. S., Alam, M. T., Ohab, M. F. Bin, Ali, K. R., Jobaer, A. Al, & Monir Uddin, M. (2021). Pothole Detection System Using Region-Based Convolutional Neural Network. 2021 IEEE 4th International Conference on Computer and Communication Engineering Technology, CCET 2021, 6–11. https://doi.org/10.1109/CCET52649.2021.9544396
Kandoi, A., Agarwal, H., Revadekar, A., & Chaudhari, B. N. (2021). Pothole detection using accelerometer and computer vision with automated complaint redressal. 2021 3rd International Conference on Signal Processing and Communication, ICPSC 2021, 257–264. https://doi.org/10.1109/ICSPC51351.2021.9451762
Kempaiah, B. U., Mampilli, R. J., & Goutham, K. S. (2022). A Deep Learning Approach for Speed Bump and Pothole Detection Using Sensor Data. Lecture Notes in Electrical Engineering, 73–85. https://doi.org/10.1007/978-981-16-1338-8_7
Kharel, S., & Ahmed, K. R. (2022). Potholes Detection Using Deep Learning and Area Estimation Using Image Processing. Lecture Notes in Networks and Systems, 296, 373–388. https://doi.org/10.1007/978-3-030-82199-9_24
Kotha, M., Chadalavada, M., Karuturi, S. H., & Venkataraman, H. (2020, January 11). PotSense - Pothole detection on Indian roads using smartphone sensors. PervasiveHealth: Pervasive Computing Technologies for Healthcare. https://doi.org/10.1145/3377283.3377286
Kumar, A., Chakrapani, Kalita, D. J., & Singh, V. P. (2020, February 1). A modern pothole detection technique using deep learning. 2nd International Conference on Data, Engineering and Applications, IDEA 2020. https://doi.org/10.1109/IDEA49133.2020.9170705
Kyriakou, C., Christodoulou, S. E., & Dimitriou, L. (2019). Smartphone-Based Pothole Detection Utilizing Artificial Neural Networks. Journal of Infrastructure Systems, 25(3), 04019019. https://doi.org/10.1061/(ASCE)IS.1943-555X.0000489
Lekshmipathy, J., Velayudhan, S., & Mathew, S. (2021). Effect of combining algorithms in smartphone based pothole detection. International Journal of Pavement Research and Technology, 14(1), 63–72. https://doi.org/10.1007/S42947-020-0033-0
Li, R., & Liu, C. (2021). Road Damage Evaluation via Stereo Camera and Deep Learning Neural Network. IEEE Aerospace Conference Proceedings, 2021-March. https://doi.org/10.1109/AERO50100.2021.9438528
Lopes, T. R. L., Dias, L. P. S., Da Costa, C. A., De Nardin, I. F., & Da Rosa Righi, R. (2020). Collaborative humanless model for automatic pothole detection and driver notification. International Journal of Computational Science and Engineering, 22(2–3), 280–296. https://doi.org/10.1504/IJCSE.2020.107350
Mamatha, G., Sharan, H. S., Prathik, R., Priya, D. S., & Prajwal, U. (2020). Smart vehicular communication for road status analysis and vehicle trajectory prediction. Proceedings of the 3rd International Conference on Smart Systems and Inventive Technology, ICSSIT 2020, 1081–1087. https://doi.org/10.1109/ICSSIT48917.2020.9214252
Muhammad Hanif, H., Lie, Z. S., Astuti, W., & Tan, S. (2020). Pothole detection system design with proximity sensor to provide motorcycle with warning system and increase road safety driving. IOP Conference Series: Earth and Environmental Science, 426(1). https://doi.org/10.1088/1755-1315/426/1/012039
Park, J. S., Lee, K. S., & Kim, S. (2019). Assessment for a condition using terrestrial lidar data. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives, 42(3/W8), 311–314. https://doi.org/10.5194/ISPRS-ARCHIVES-XLII-3-W8-311-2019
Park, S. S., Tran, V. T., & Lee, D. E. (2021). Application of various yolo models for computer vision-based real-time pothole detection. Applied Sciences (Switzerland), 11(23). https://doi.org/10.3390/APP112311229
Patra, S., Middya, A. I., & Roy, S. (2021). PotSpot: Participatory sensing based monitoring system for pothole detection using deep learning. Multimedia Tools and Applications, 80(16), 25171–25195. https://doi.org/10.1007/S11042-021-10874-4
Pawar, K., Jagtap, S., & Bhoir, S. (2020). Efficient pothole detection using smartphone sensors. International Conference on Automation, Computing and Communication, 32. https://doi.org/10.1051/ITMCONF/20203203013
Pratama, I. D., Mahmudah, H., & Sudibyo, R. W. (2021). Design and Implementation of Real-time Pothole Detection using Convolutional Neural Network for IoT Smart Environment. International Electronics Symposium 2021: Wireless Technologies and Intelligent Systems for Better Human Lives, IES 2021 - Proceedings, 675–679. https://doi.org/10.1109/IES53407.2021.9594038
Pundir, P., Gupta, S., Patel, R. S., Goswami, R., Singh, D., & Kumar, K. (2021). POCONET: A Pathway to Safety. Lecture Notes in Networks and Systems, 175, 299–306. https://doi.org/10.1007/978-3-030-67187-7_31
Rahman, A., Mustafa, R., & Hossain, M. S. (2022). Real-time Pothole Detection and Localization Using Convolutional Neural Network. In Lecture Notes on Data Engineering and Communications Techbologies (pp. 579–592). Springer Science and Business Media Deutschland GmbH. https://doi.org/10.1007/978-981-16-6636-0_44
Ravi, R., Bullock, D., & Habib, A. (2020). Highway and airport runway pavement inspection using mobile lidar. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives, 43(B1), 349–354. https://doi.org/10.5194/ISPRS-ARCHIVES-XLIII-B1-2020-349-2020
Riedl, K., Huber, S., Bomer, M., Kreibich, J., Nobis, F., & Betz, J. (2020, September 10). Importance of Contextual Information for the Detection of Road Damages. 2020 15th International Conference on Ecological Vehicles and Renewable Energies, EVER 2020. https://doi.org/10.1109/EVER48776.2020.9242954
Shah, A., Sharma, G., & Bhargava, L. (2021). Smart implementation of computer vision and machine learning for pothole detection. Proceedings of the Confluence 2021: 11th International Conference on Cloud Computing, Data Science and Engineering, 65–69. https://doi.org/10.1109/CONFLUENCE51648.2021.9376886
Shahin, M. (2006). Pavement Management for Airports, Roads, and Parking Lots (2nd. ed.). Springer.
Silvister, S., Komandur, D., Kokate, S., Khochare, A., More, U., Musale, V., & Joshi, A. (2019, December 1). Deep Learning Approach to Detect Potholes in Real-Time using Smartphone. 2019 IEEE Pune Section International Conference, PuneCon 2019. https://doi.org/10.1109/PUNECON46936.2019.9105737
Singh, G., Bansal, D., Sofat, S., & Aggarwal, N. (2017). Smart patrolling: An efficient road surface monitoring using smartphone sensors and crowdsourcing. Pervasive and Mobile Computing, 40, 71–88. https://doi.org/10.1016/J.PMCJ.2017.06.002
Singh, K., Hazra, S., Mukherjee, C., Sushanth, G., & Gowda, S. (2020). Iot based real time potholes detection system using image processing techniques. International Journal of Scientific and Technology Research, 9(2), 785–789.
Srivastava, A., Goyal, A., & Ram, S. S. (2020). Radar cross-section of potholes at automotive radar frequencies. 2020 IEEE International Radar Conference, RADAR 2020, 483–488. https://doi.org/10.1109/RADAR42522.2020.9114858
Thakur, M., Sharma, V., & Wavhal, P. (2020). IoT based pothole detection and warning system. International Journal of Advanced Science and Technology, 29(4 Special Issue), 767–770.
Thiruppathiraj, S., Kumar, U., & Buchke, S. (2020). Automatic pothole classification and segmentation using android smartphone sensors and camera images with machine learning techniques. IEEE Region 10 Annual International Conference, Proceedings/TENCON, 2020-November, 1386–1391. https://doi.org/10.1109/TENCON50793.2020.9293883
Tithi, A., Ali, F., & Azrof, S. (2021, July 8). Speed bump & pothole detection with single shot multibox detector algorithm & speed control for autonomous vehicle. 2021 International Conference on Automation, Control and Mechatronics for Industry 4.0, ACMI 2021. https://doi.org/10.1109/ACMI53878.2021.9528185
Tsai, J. C., Lai, K. T., Dai, T. C., Su, J. J., Siao, C. Y., & Hsu, Y. C. (2020, November 4). Learning Pothole Detection in Virtual Environment. 2020 International Automatic Control Conference, CACS 2020. https://doi.org/10.1109/CACS50047.2020.9289740
Van Khang, N., & Renault, E. (2019). Cooperative sensing and analysis for a smart pothole detection. 2019 15th International Wireless Communications and Mobile Computing Conference, IWCMC 2019, 1785–1790. https://doi.org/10.1109/IWCMC.2019.8766600
Vittorio, A., Rosolino, V., Teresa, I., Vittoria, C. M., Vincenzo, P. G., & Francesco, D. M. (2014). Automated Sensing System for Monitoring of Road Surface Quality by Mobile Devices. Procedia - Social and Behavioral Sciences, 111, 242–251. https://doi.org/10.1016/J.SBSPRO.2014.01.057
Wang, L. (2021). Research on Road Pothole Detection Method Based on Computer Image Restoration Technology. Journal of Physics: Conference Series, 1992(3). https://doi.org/10.1088/1742-6596/1992/3/032028
Yebes, J. J., Montero, D., & Arriola, I. (2021). Learning to Automatically Catch Potholes in Worldwide Road Scene Images. IEEE Intelligent Transportation Systems Magazine, 13(3), 192–205. https://doi.org/10.1109/MITS.2019.2926370
Yik, Y. K., Alias, N. E., Yusof, Y., & Isaak, S. (2021). A real-time pothole detection based on deep learning approach. Journal of Physics: Conference Series, 1828(1). https://doi.org/10.1088/1742-6596/1828/1/012001
